Cela va faire presque deux ans que je pratique à nouveau l'aéromodélisme. Je suis tombé
dedans à 14 ans, et j'avais du laisser cette activité en suspend lorsque j'entamais
mes études supérieures. Il y a environ deux ans, je décidais de m'y remettre et faisais
alors l'acquisition d'un avion radiocommandé thermique, car mes précédents modèles
n'étaient pas terminés et avaient fini en bois de chauffage (ou presque). Tout
se passait bien, jusqu'à la séance de la semaine dernière où mon avion s'est
lamentablement écrasé dans un champ. C'est l'occasion de mener une petite enquête style
BEA afin de trouver l'origine de l'accident.
Le crash
Je m'étais installé tranquillement sur le terrain du club (homologué DGAC), et j'ai
entamé cette session de vol par la vérification du modèle. Cette étape est obligatoire,
durant laquelle on effectue un ensemble de vérifications avant le vol. Les pilotes
d'avions grandeurs (des "vrais" avions, les chanceux) suivent exactement le même procédé avant
chaque vol. Je vérifie ainsi le bon état des servomoteurs, des connections électriques
et électroniques, ainsi que l'état des commandes de gouvernes, les serrages des vis, etc.
Tout est passé au crible avant la mise en route du modèle, afin d'éviter toute surprise
en vol.
J'effectue ensuite plusieurs vols afin de m'entraîner aux atterrissages, car c'est
une phase qui est relativement sensible et que je dois en particulier travailler. Oui,
j'ai appris à piloter assez récemment, et ceci fait partie de l'entraînement du
débutant. Tout se passe bien jusque là, mes atterrissages ne sont pas parfaits mais
l'avion se pose en un morceau et en douceur à chaque fois. Après avoir usé un plein
de carburant, je remplis à nouveau le réservoir et entame une autre série de vols,
toujours dans l'optique d'affiner ma technique d'atterrissage.
Je pose l'avion une fois et je repars dans la foulée (un "touch and go"), j'entame
une autre approche et me rend compte que cela va être difficile de poser. En effet,
l'avion arrive trop haut et si je prends la décision de poser, il terminera sa course
en dehors de la piste et certainement dans un sale état. Dans ce cas de figure,
l'usage veut que l'on remette les gaz à fond et que l'on prenne de l'altitude, ce que
je fais. Enfin, l'avion reprend de la vitesse mais reste en phase de descente.
La commande de profondeur, qui gère l'inclinaison de l'avion, ne semble plus répondre.
Je vois ainsi l'avion foncer plein gaz vers le sol, en légère descente, avec pour
conséquence un crash assuré.
En dernier espoir et vu qu'il me restait encore un peu de marge, je décide de m'acharner
sur la commande de profondeur. Et elle se remet à fonctionner ! L'avion cabre un peu brusquement
et reprend de l'altitude. Malheureusement, vu que j'étais en panique j'ai un peu forcé
sur la commande et du coup il risque le décrochage, et là encore c'est le crash assuré.
J'essaie d'ajuster l'inclinaison en faisant piquer légèrement l'avion, mais rien n'y fait.
C'est le décrochage. L'avion se met à piquer vers le sol, et je n'ai pu que couper les gaz
et observer le résultat: un bruit sourd fait de bois qui craque, de toile qui se froisse
et de moteur qui s'écrase dans la terre. Je ramasse les restes dans le champ voisin, je
mets le tout dans la voiture et rentre chez moi.
Analyse de l'accident
Une fois à la maison, je tente de rassembler mes souvenirs. Pas facile, tout cela
s'est déroulé en un temps relativement court, et je crois me rappeler de choses qui
au final ne sont peut-être pas arrivées. Pendant un temps je pensais que la commande
des gaz ne répondait plus, mais après quelques jours j'étais à nouveau persuadé
qu'elle fonctionnait bien (cf. les faux souvenirs).
Tout comme le BEA mène l'enquête lors d'accidents ou d'incidents impliquant des aéronefs,
je décidais de chercher l'origine du mien. A ce stade de l'enquête, je suspecte tout
de même plusieurs organes d'être à l'origine du dysfonctionnement: le récepteur peut
avoir cafouillé, les servomoteurs être tombés en panne, ou les commandes des gouvernes
peuvent avoir lâché.
Première étape, analyser les commandes des gouvernes. Un problème mécanique est si
vite arrivé, bien que j'ai vérifié ces dernières avant le vol. Aucune surprise de
ce côté là, tout est bien fixé et rien n'a lâché. Cela ne semble pas venir de la
mécanique. Je passe ensuite au récepteur, l'alimente de nouveau et vérifie la
connexion avec la radiocommande. Pas de perte au niveau de cette dernière, et un
servomoteur branché sur les gaz répond très bien. Je teste avec le même servomoteur
l'ensemble des commandes, et tout fonctionne comme prévu. Le récepteur est donc
peu susceptible d'avoir eu un défaut de fonctionnement, mais un défaut de réception
n'est pas à exclure. Enfin, je reconnecte tous les servos au récepteur (à l'exception
des ailes) et vérifie le fonctionnement de ces derniers. Et là, surprise ! Le
servomoteur gérant la profondeur ne répond pas. Pire, lorsqu'il est actionné
manuellement, il bouge et se bloque de manière intempestive !
Il ressort ainsi plusieurs hypothèses des premières constatations. La première
hypothèse formulée est que le récepteur a eu des difficultés à recevoir les
signaux de ma radiocommande. La seconde est que le servomoteur de la profondeur
a eu un défaut de fonctionnement. La troisième est que la panne a été causée par
un évènement inconnu qui n'a pas survévu au crash. Parmi ces hypothèses, la première
est très peu probable car au moment de l'atterrissage, ma radiocommande était
proche de l'avion. La troisième est très difficile à déterminer car elle nécessite
une inspection minutieuse des débris, ce qui est plus complexe à faire sur un
modèle réduit que sur un véritable avion. Imaginez, un modèle réduit n'utilise
pas de tôle pour ses parois mais une simple toile tendue... Je décide donc de
creuser la seconde hypothèse.
Analyse du servomoteur défectueux
Le servomoteur en question est un HS-311 conçu par Hitec. Ce type de servomoteur
est peu onéreux et réputé pour être fiable, et est utilisé par de nombreux modélistes. Avant
d'entrer dans les détails de l'analyse, quelques rappels sur le fonctionnement des servomoteurs.
Un servomoteur est un système électromécanique permettant de convertir une information
de position (la commande transmise) en mouvement mécanique asservi (la position du pignon).
Le servomoteur a donc un moteur pour provoquer le mouvement mécanique couplé à un capteur
de position, généralement un potentiomètre relié aux pignons du mécanisme de réduction.
Le servomoteur est ainsi capable de faire tourner le moteur dans un sens ou dans l'autre,
en fonction de la position à atteindre. Son système de pignons de réduction permet d'assurer
un certain couple et une résistance aux efforts.
Je décide alors de démonter intégralement le servomoteur, afin d'isoler l'électronique
de la mécanique. Je mets de côté le circuit imprimé qui contrôle le moteur à courant
continu, et dessoude le moteur. Dans un premier temps, je me concentre sur le moteur: je
câble directement le moteur sur une batterie, et tente d'appliquer un effort sur le
pignon principal. Et là, j'arrive à stopper la rotation du moteur, ce qui n'est pas du
tout normal. En effet, le moteur devrait se remettre à tourner mais au lieu de cela, il
reste immobile. On dirait bien que le moteur est à l'origine du problème.
Je démonte alors le moteur à coups de pince, et à l'aide d'une dose de force et de
subtiles coups donnés sur l'axe arrive à le démonter intégralement. Si vous n'avez
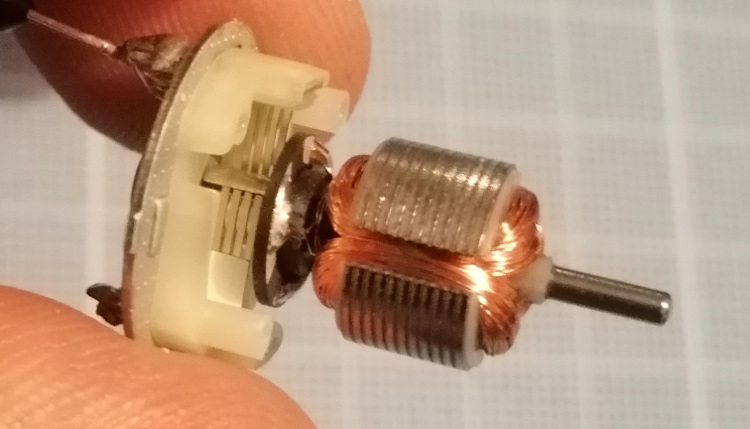
jamais vu l'intérieur d'un moteur à courant continu, les photos ci-dessous vous éclaireront.
Il s'agit d'un moteur à pinceaux (ou moteur "brushed"), qui font contact avec une bague
spécifique (le commutateur) qui alimente ensuite les différentes bobines et fait
tourner le rotor. Le stator quant à lui est simplement composé d'un gros aimant.
Le moteur ici présent possède un rotor constitué de trois bobines, chacune ayant
un contact dédié sur l'axe du rotor avec lequel les pinceaux sont en contact.
Vérifions le bon état des bobines, pour cela je mesure la résistance à l'aide d'un
multimètre. Si cette résistance est non-nulle (une dizaine d'ohms) cela signifie
que la bobine est opérationnelle. Si cette dernière est nulle ou infinie, cela
signifie que la bobine a fondu (court-circuit) ou que le fil est rompu à un endroit.
Dans mon cas, il se trouve que deux bobines ont une résistance infinie, et donc que leurs
bobinages sont rompus.
La conséquence de ce défaut est triviale: pour une position
spécifique du rotor du moteur, la bobine associée ne produira aucun champ magnétique
et donc aucun mouvement. Ceci dit, le rotor a une certaine inertie et en temps normal
celle-ci permet de passer au delà du bobinage défectueux et de garder le moteur en
rotation. Cependant, si le servomoteur s'arrête sur une bobine défectueuse, cela
va causer une défaillance dans le couple et potentiellement un arrêt du moteur.
Autrement dit, le moteur ne redémarrera pas si ce dernier est déjà arrêté avec
les pinceaux alimentant une ou deux bobines défectueuses.
Recherche de l'origine du défaut du moteur
Si l'on cherche sur Internet les spécifications du moteur, on tombe au bout d'un
moment sur un moteur à l'allure très proche, le JL-RF020 de Shantou Jiali Micro Motor Co. Ltd,
qui possède les mêmes dimensions et la même allure:
Et voici la fiche technique du JL-RF020. Jugez de la ressemblance:
Le moteur est ainsi annoncé avec une tension nominale de 4.5 volts et une tension
maximale de 5.5 volts. Etrange, car la fiche technique du servomoteur indique que
ce dernier accepte une tension d'alimentation allant de 4.8 volts à 6 volts.
Cette tension d'alimentation est appliquée à chaque bobine du moteur,
sachant que deux bobines sur 3 sont alimentées en permanence.
A l'aide de mon multimètre, j'ai mesuré la résistance de la seule bobine
restante: environ 14 ohms. Cela donne un courant maximal pour le moteur de:
I = U/R = 6.0 / (1/((1/14)+(1/14)) = 0.857 A
Chaque bobine est parcourue par un courant de 430 mA environ lorsque le servomoteur est
soumis à une tension de 6 volts. Une rupture du fil de bobinage d'une bobine de
moteur est très probablement due à une surintensité, ce qui a pour conséquence
de faire fondre ce dernier et de couper le circuit. Comme un fusible.
La résistance de la bobine étant fixe, seule une tension plus élevée que 6 volts
peut provoquer une intensité supérieure à 430 mA.
La tension relevée sur l'accu NiMH utilisé dans mon avion était de 6.7 volts au
moment du crash. Cette tension était relevée en temps réel et affichée sur ma
radiocommande dans les informations de télémétrie. Calculons l'intensité du courant
fourni au moteur:
I = U/R = 6.7 / 7 = 0.957 A
Une telle intensité est au-delà de ce que peut supporter le moteur. Si l'on
regarde l'intensité maximale que peut supporter le fil du bobinage, en nous basant
sur son diamètre (0.18mm), on peut se rendre compte que ce dernier tolère au maximum 430 mA,
soit approximativement l'intensité parcourant le bobinage lorsque le moteur est
alimenté en 6V.
Si l'on alimente le moteur avec 6.7V, l'intensité parcourant le bobinage provoque
un échauffement qui peut être fatal au moteur. Cependant, le fil met du temps à
chauffer et fondre, et il faut que cette intensité traverse le fil durant une
certaine période de temps.
Origine de la surintensité
Tout porte à croire que le servomoteur a été victime d'une surintensité qui a
provoqué la rupture d'un fil de bobinage du moteur et le blocage de ce dernier.
Mais comment ce servomoteur s'est-il retrouvé alimenté par une tension supérieure à
la tension maximale de fonctionnement (6V) ?
J'utilise un accumulateur NiMH ("Nickel - Metal hydride"), qui est composé de 5
cellules. Chaque cellule délivre 1.2V, soit 6V au total. Mais ça, c'est dans le
meilleur des mondes. Car lorsque l'on charge une batterie NiMH, les cellules peuvent
être chargées jusqu'à environ 120% de leur capacité, soit 1.44V chaque. Ce qui
donne une tension de sortie de 7.2 volts, au lieu des 6 volts nominaux. De fait,
l'emploi de cet accumulateur lorsqu'il est pleinement chargé augmente les risques
de rupture du fil de bobinage du servomoteur provoqué par une surintensité.
Il aurait mieux fallu choisir un accumulateur de 4.8 volts (composé de 4 cellules),
dont la tension maximale fournie à pleine charge est de 5.8 volts, ce qui ne risque pas d'endommager
le servomoteur. Le site sur lequel j'ai acheté l'avion en question recommandait l'accumulateur de 6 volts,
je n'ai pas forcément cherché à vérifier les spécifications de ce dernier et ai
donc suivi les recommandations du vendeur.
Conclusion
Après investigation, le moteur du servomoteur gérant la profondeur a subi une surintensité
qui a amené deux des trois bobinages du rotor à se rompre, provoquant un dysfonctionnement
du servomoteur. La commande de profondeur étant très sollicitée notamment lors des phases
d'atterrissage, la probabilité d'un défaut de ce servomoteur était relativement élevée.
Une pleine charge de l'accumulateur de réception a amené ce dernier à fournir une tension
supérieure à la tension maximale supportée par les servomoteurs, ce qui est probablement
à l'origine de la surintensité qui a causé la défaillance.
Avant cette session de vol, j'avais chargé à bloc l'accumulateur de réception bien
que ce dernier ait été peu utilisé lors de la session précédente. Habituellement,
l'accumulateur fournit une tension autour de 6 volts (entre 6 et 6.2 volts) car
je le chargeais rarement au maximum. C'est donc ma méconnaissance du fonctionnement
des accumulateurs NiMH et le fait que je n'ai pas consulté la documentation du
constructeur du servomoteur qui sont à l'origine de ce crash.
Leçon apprise.
Les contenus disponibles sur ce blog sont publiés sous licence Creative Commons BY-NC-SA.
Vous pouvez réutiliser tout ou partie de ces contenus à condition de citer l'auteur et l'origine, vous ne pouvez en faire une utilisation commerciale, et enfin vous devez partager tout travail ou œuvre dérivée sous les mêmes conditions — c'est-à-dire avec la même licence d'utilisation Creative Commons.